HistoriqueFin 1999 et à trois mois d'intervalle, la NASA perdait les deux sondes de la mission Mars Surveyor 98. Une véritable tragédie pour la vénérable agence qui fut alors forcé de revoir de fond en comble son ambitieux programme d'exploration martienne. Après avoir confirmé le départ d'un orbiteur en 2001 (et sacrifié dans la foulée l'atterrisseur qui allait avec), la NASA devait se pencher en toute hâte sur la fenêtre de tir suivante, qui s'ouvrait au beau milieu de l'année 2003. Deux groupes, l'un situé au Jet Propulsion Laboratory (le centre de la NASA qui a la charge des missions interplanétaires) et l'autre situé chez Lockheed Martin Astronautics (le constructeur attitré de la NASA pour de nombreuses sondes martiennes) allaient être mis en compétition. Au terme d'une étude intensive de deux mois, le groupe de Lockheed Martin propose un orbiteur scientifique doté de cinq instruments scientifiques. A l'aide d'une caméra très haute résolution capable de discerner des objets de seulement 60 centimètres d'envergure et une batterie de spectromètres, l'orbiteur pouvait s'attaquer à la problématique de l'eau martienne et rechercher des preuves topographiques et minéralogiques de la présence du précieux liquide dans un passé plus ou moins lointain. De son côté, le Jet Propulsion Laboratory opte pour une mission plus risquée, mais aussi plus excitante : l'atterrissage sur Mars d'une version plus puissante du rover Sojourner, le célèbre robot de la mission Pathfinder. Orbiteur ou rover, le choix était particulièrement difficile pour la NASA, d'autant plus que l'agence spatiale était pressée par le temps. Au-delà du 1er août 2000, une décision devait impérativement être prise, ou aucune mission américaine ne partirait jamais vers la planète rouge en 2003. Le 27 juillet 2000, la NASA annonce que le rover est finalement retenu. Les considérations scientifiques n'ont sans doute pas été déterminantes dans le choix de l'agence spatiale : la moisson de résultats était prometteuse dans les deux cas, et l'orbiteur (aujourd'hui programmé pour 2005) était aussi excitant, scientifiquement parlant, que l'atterrisseur. La NASA a plutôt jugé préférable de retourner à la surface de Mars. En 2003, la planète rouge doit effectivement recevoir la visite d'un certain nombre de satellites. La sonde européenne Mars Express viendra tenir compagnie à deux orbiteurs déjà présents sur place : Mars Global Surveyor et Mars Odyssey. Seuls les britanniques oseront s'aventurer au sol avec l'atterrisseur Beagle 2 qui accompagne Mars Express. Les orbiteurs étant assez nombreux, il était plus logique de se tourner vers une mission de surface. D'autant plus qu'un rover qui déambule à la surface de Mars est bien plus enthousiasmant pour le public que les orbites répétitives et ennuyeuses d'un satellite. Et la NASA, après les deux échecs de 1999, a bien besoin de redorer son blason ... Comme en témoigne le calendrier des missions martiennes, l'année 2003 est un cru exceptionnel pour l'exploration de la planète rouge et l'agence spatiale américaine ne pouvait pas se permettre de laisser passer une telle opportunité. Non seulement la planète Mars sera au plus proche de la Terre (56 millions de kilomètres), avec tous les avantages que cela comporte, mais les conditions d'illumination en surface seront aussi excellentes. Pour profiter au maximum de cette situation exceptionnelle, la NASA a décidé, après quelques semaines d'hésitation, que le rover ne partirait pas seul et qu'un deuxième exemplaire identique le rejoindrait sur Mars. Cela faisait bien longtemps qu'une mission martienne n'avait pas été doublée : Il faut remonter à 1976 côté américain (mission Viking) et 1988 côté russe (mission Phobos) pour voir deux sondes jumelles s'élancer ensemble vers la planète rouge. Le fait de doubler une mission permet non seulement de maximiser les résultats scientifiques (ceux-ci étant plus que doublés puisque la comparaison des résultats recueillis sur les deux sites d'atterrissage est en elle-même porteuse d'information), mais aussi d'accroître sensiblement la fiabilité et les chances de succès, ce qui intéresse particulièrement la NASA. Bien entendu, étant donné que les sondes en partance seront identiques, une erreur de design commune peut toujours conduire à la perte des deux engins. L'idéal consiste donc à retarder suffisamment la deuxième mission (de quelques semaines) pour donner le temps aux ingénieurs de profiter des éventuels enseignements apportés par la première. Le coût de la mission est estimé à environ 800 millions de dollars, répartis entre le développement des rovers (625 millions de dollars), le lancement (100 millions de dollars) et les opérations au sol (75 millions de dollars). Le prix est donc sensiblement plus élevé que celui de la mission Pathfinder (265 millions de dollars) et est sans commune mesure avec celui de Mars Polar Lander (seulement 165 millions de dollars). La perte de Mars Climate Orbiter et de Mars Polar Lander a apparemment suffisamment échaudé la NASA pour que celle-ci n'ait plus l'intention de faire des économies de bout de chandelle. Deux rescapés sur MarsLes deux rovers existaient depuis longtemps dans les cartons de la NASA et leur histoire est déjà quelque peu mouvementée. Un exemplaire très similaire aux rovers actuels devait initialement partir vers la planète rouge en 2001 pour arpenter sa surface et commencer une collecte d'échantillons de roches et de sols. Un autre robot du même gabarit aurait dû venir le rejoindre en 2003 pour continuer le travail. La précieuse récolte aurait ensuite été mise à l'abri en attendant qu'un troisième robot vienne la récupérer en 2005 pour la placer dans une fusée qui aurait finalement pris la direction de la Terre. Ce concept proposé dans le cadre d'une ambitieuse mission de retour d'échantillons a finalement été abandonné, en partie parce qu'il nécessitait un atterrissage de précision hors de portée de nos capacités techniques actuelles. La fusée de retour et son robot collecteur devaient effectivement atterrir au voisinage immédiat des petits tas de cailloux érigés par le rover et son collège. De plus, l'engin coûtait bien trop cher pour le budget alloué à la mission Mars Surveyor 2001. Enfin, du point de vue des ingénieurs, de nombreux challenges techniques restaient à relever (mise au point de batteries par exemple), et un départ en 2001 était précipité. Pour 2001, l'ambitieux robot fut donc mis au placard pour être remplacé par une version plus modeste, une simple copie carbone du robot Sojourner. Baptisé Marie Curie, ce dernier ne fera pas long feu : sa mission sera annulée en même temps que celle de l'atterrisseur de Mars Surveyor 2001, après la disparition de Mars Polar Lander en décembre 1999. Allant de déception en déception, la patience de l'équipe responsable du rover aura finalement porté ses fruits. Après avoir accompli brillamment plusieurs tests sur le terrain (par l'intermédiaire d'un prototype portant le nom évocateur de FIDO), le descendant de Sojourner va bel et bel connaître le sol martien, certes avec quelques années de retard. Mais mieux vaut tard que jamais ! Spirit et OpportunityConnus pendant longtemps sous le sigle MER-A et MER-B, les deux rovers ont été baptisés officiellement Spirit et Opportunity au début du mois de juin 2003, quelques jours seulement avant l'ouverture de leur fenêtre de tir. Les deux noms ont été choisis à l'issue d'un concours, organisé par la NASA et la Planetary Society et qui a réuni quelques 10 000 écoliers. La gagnante est une orpheline de 9 ans née en Sibérie, Sofi Collis. L'acte de naissance de Spirit et d'Opportunity est un texte émouvant écrit de sa main : "Je vivais dans un orphelinat. Il était froid et sombre, et j'étais seule. J'ai regardé le ciel étincelant et je me suis sentie mieux. Je me suis mis à rêver que je pourrai voler là-haut un jour. En Amérique, tous mes rêves peuvent devenir réalité. Merci pour l'esprit (Spirit) et l'opportunité (Opportunity)". Une autre initiative a permis de recueillir plusieurs millions de noms (3 551 645 très exactement) destinés à être gravés sur deux DVD qui seront déposés à la surface de Mars par Spirit et Opportunity. Les rovers Apparentés à Sojourner, Spirit et Opportunity seront bien plus puissants. D'un poids de 174 kg (contre 10,5 kg pour son aîné), chaque rover sera capable de traverser chaque jour une quarantaine de mètres à la surface de Mars, soit six à dix fois la distance totale parcourue par Sojourner pendant les trois mois de sa mission ! Spirit et Opportunity sont principalement composé d'un caisson réalisé dans un matériau composite en nid d'abeille, et isolé thermiquement par de l'aérogel, une substance dont les propriétés physiques sont telles qu'elle figure dans le livre des records. Ce caisson est recouvert d'un panneau triangulaire tapissé de cellules solaires, la plateforme, sur laquelle sont fixés cinq panneaux solaires mobiles, trois antennes et le mât instrumental. Mesurant 1,66 mètres de long pour 2,30 mètres de largueur (panneaux solaires déployés) et 1,58 mètres de hauteur (des roues jusqu'au sommet du mât), les rovers possèdent les dimensions d'une petite voiture de golf. Chaque engin est également équipé d'un bras robotique, aussi long que son homologue humain et qui porte à son extrémité une batterie d'instruments scientifiques montés sur un barillet. Pour ses déplacements à la surface de Mars, le rover possède 6 roues de 26 centimètres de diamètre. Chaque roue possède son propre moteur et peut s'orienter dans n'importe quelle direction, ce qui autorise une grande variété de mouvements. Alimentation énergétique Au cours de leur périple martien, les rovers tireront leur énergie du Soleil, grâce à des panneaux solaires situés sur leur dos. Ces derniers, qui occupent une surface de 1,38 m2, rechargeront deux batteries au lithium. Celles-ci prendront le relais des panneaux solaires la nuit. La puissance nominale délivrée par l'ensemble sera de 900 watts heure en début de mission, pour passer à 600 watts en fin de mission. Communications Historiquement, les rovers ne devaient communiquer qu'avec des satellites en orbite martienne, mais les sondes qui devaient être disponibles en 2003 autour de Mars pour jouer le rôle de relais de transmission sont aujourd'hui moins nombreuses que prévu. Le lancement du premier satellite du projet Mars Network n'interviendra probablement qu'en 2007 et la NASA ne peut plus compter sur Mars Climate Orbiter depuis son crash en septembre 1999. Reste les sondes Mars Odyssey et Mars Global Surveyor (dont le relais ne peut fonctionner que dans le sens Mars - Terre). Spirit et Opportunity ne peuvent donc s'appuyer que sur deux satellites relais, ce qui n'est pas suffisant pour la NASA. Les rovers ont alors été équipés de dispositifs de télécommunication supplémentaires. Pour communiquer avec la Terre, chaque robot dispose :
Spirit et Opportunity établiront le contact avec la Terre sur des fréquences différentes, de manière à éviter toute confusion sur l'identité du rover situé au bout de la ligne. Navigation Grâce à ses multiples yeux électroniques, le rover pourra repérer les éventuels obstacles qui se dresseront sur sa route et prendre de lui-même les mesures qui s'imposeront pour les éviter. Sa garde au sol lui permettra de franchir des obstacles d'une hauteur identique à la taille de ses roues, soit 26 centimètres. Par mesure de précaution, des obstacles d'une hauteur supérieure à 20 centimètres seront contournés. Sur un sol plat, la vitesse de pointe de chaque rover est de 5 centimètres par seconde. Lorsqu'il est livré à lui-même et qu'il doit détecter d'éventuels obstacles, le rover est cependant contraint de rouler plus lentement : il avance alors à la vitesse moyenne de 1 cm par seconde. Pour appréhender leur environnement immédiat et juger de sa dangerosité, les rovers sont équipés de deux paires de caméras stéréo anti-dangers, l'une montée sur l'avant du rover, l'autre boulonnée à l'arrière. Ces caméras alimenteront en données des routines d'intelligence artificielle. La caméra frontale permettra également de surveiller les évolutions du bras robotique. Deux caméras de navigation grand angle à faible résolution sont de plus fixées sur le mât instrumental, de part et d'autre de la caméra panoramique. Si un rover se trouve confronté à un obstacle insurmontable, il se figera sur place et demandera des instructions à la Terre. Régulation thermique De nombreux composants électroniques ne sont pas conçus pour résister aux températures glaciales qui règnent sur Mars. L'intérieur du rover est donc maintenu à une température clémente grâce à divers dispositifs : des petits radiateurs électriques, 8 générateurs radio isotopiques (renfermant chacun 2,7 grammes de plutonium, dont la désintégration fourni de la chaleur), et enfin la chaleur émise par les systèmes électroniques. Les deux rovers ont été entièrement construits par le Jet Propulsion Laboratory, contrairement aux deux dernières sondes martiennes de la NASA, Mars Climate Orbiter et Mars Polar Lander, qui avaient été confiées aux bons soins de la firme Lockheed Martin Astronautics. Après l'échec de ces deux missions, cette société avait été montrée du doigt. Pour Spirit et Opportunity, le centre de Pasadena a donc retrouvé ses prérogatives de constructeur, une sorte de retour aux sources qui a été vivement applaudi par les ingénieurs du JPL. La missionLe 10 juin 2003, Spirit s'est s'envolé vers Mars depuis Cap Canaveral à bord d'une fusée Delta II 7925. Opportunity, qui l'a rejoint dans sa course vers la planète rouge le 8 juillet 2003 après une longue série de reports (le décollage était initialement prévu pour le 25 juin), a quant à lui été propulsé par une version "lourde" du lanceur de Boeing (Delta II 7925H). Celui-ci était doté de propulseurs d'appoints montés d'habitude sur les fusées de la classe Delta III, et capables de délivrer 25 % de poussée supplémentaire. Les deux rovers mettront environ 7 mois et demi pour parcourir la distance Terre - Mars. Au cours de cette période, un maximum de 6 manœuvres de correction de trajectoires (TCM) pourront être effectuées pour affiner la course des deux engins. La position des rovers sera régulièrement déterminée grâce à deux méthodes traditionnellement utilisées par les navigateurs interplanétaires (mesure du temps nécessaire au signal radio pour faire un aller retour et mesure du décalage Doppler). Une triangulation, effectuée à partir de deux stations du Deep Space Network géographiquement éloignées, permettra en outre de diminuer l'incertitude pesant sur la position des rovers dans l'espace de plusieurs kilomètres, et d'éviter ainsi la mésaventure de Mars Climate Orbiter. Deux antennes, fixées sur l'étage de croisière, seront utilisées pour les communications pendant le voyage Terre - Mars : une antenne à faible gain omnidirectionnelle (qui n'a pas besoin d'être pointée dans une direction précise pour fonctionner), et une antenne directionnelle à moyen gain. A l'issue de cette phase de croisière, le premier véhicule atterrira sur Mars le 4 janvier 2004, en début d'après-midi (environ 14h00 heure locale martienne). Le deuxième atterrissage aura lieu le 25 janvier 2004, soit environ un mois plus tard, à 13h15 heure locale martienne. 3.. 2.. 1.. touchdown !Après le crash de Mars Polar Lander, la NASA a jugé préférable de revenir au système d'atterrissage de la sonde Pathfinder. Mars Polar Lander s'appuyait sur un système d'atterrissage conventionnel hérité des sondes Viking : freinage sous parachute suivi d'une décélération par rétrofusée, la sonde touchant finalement la surface sur ses pieds. Etant donné les dangers omniprésents de la surface martienne, les ingénieurs pensent aujourd'hui que cette technique n'est pas la façon la plus sûre d'aborder la planète rouge. Elle laisse un peu trop de place au hasard et à la chance. Malgré tous nos moyens techniques, on ne peut effectivement pas encore deviner ce qui va se trouver juste sous les pieds de l'atterrisseur. Une pente un peu trop forte, un rocher mal placé et la mission peut s'achever en catastrophe. Le système d'airbags, validé par Pathfinder, semble constituer à ce jour la meilleure solution. Un atterrissage sous haute surveillance Pendant toute la phase d'entrée, de descente et d'atterrissage (EDL), la NASA gardera le contact avec les rovers. Bien que les communications soient réduites à leur plus simple expression (les rovers se contenteront effectivement de signaler à la Terre le déroulement des principales étapes grâce à des changements de tonalité), cela permettra aux ingénieurs de collecter des données qui pourraient s'avérer très précieuses en cas de problème, et d'éviter ainsi de rééditer le triste exploit de Mars Polar Lander. Ce dernier, qui n'avait pas été conçu pour envoyer des données télémétriques à la Terre lors de son atterrissage, a disparu corps et âme au-dessus du pôle sud martien en décembre 1999. Aveugles, les ingénieurs n'ont jamais pu déterminer la cause de l'accident. Une situation intolérable, dont la NASA ne veut plus jamais entendre parler. Si le premier rover s'évanouit lui aussi lors de sa descente vers Mars, les ingénieurs auront au moins entre leurs mains quelques octets d'informations, qui pourraient s'avérer essentiels pour sauver le second rover. Pendant la phase d'atterrissage, chaque rover devrait émettre 36 tonalités de 10 secondes, chaque tonalité marquant l'accomplissement d'une étape particulière de la séquence d'atterrissage. Le signal radio est transmis par une série d'antennes à faible gain fixées sur l'étage de croisière, le bouclier arrière, l'atterrisseur et le rover lui-même. Une minute avant que Spirit et Opportunity ne touchent le sol, Mars Global Surveyor rentrera dans la danse et commencera à enregistrer des données en provenance de chaque rover. L'orbite de Mars Global Surveyor aura été spécialement ajustée pour lui permettre d'être aux premières loges lors de l'atterrissage. Si l'antenne de l'atterrisseur fonctionne toujours après le premier rebond, Mars Global Surveyor pourrait même collecter des données jusqu'à l'arrêt final de ce dernier, nous permettant ainsi d'assister à la phase finale de l'atterrissage. Les informations recueillies par l'orbiteur américain ne seront cependant pas transmises en direct à la Terre, mais seront envoyées ultérieurement. 70 minutes avant de débouler dans les hautes couches de l'atmosphère martienne, le rover tournera sur lui-même de manière à présenter vers Mars son bouclier thermique. L'émetteur radio basculera alors de l'antenne à moyen gain, utilisé pendant la phase de croisière, vers l'antenne à faible gain (le débit tombera alors à 10 bits par seconde). 55 minutes plus tard, l'intrépide rover se séparera de l'étage de croisière, qui aura alors accompli sa mission. Le robot heurtera l'atmosphère martienne à une altitude de 128 km, avec un angle de 11,5° et une vitesse de 19440 km/h. L'intense friction de l'air sur la surface du bouclier thermique (qui sera alors portée à environ 1500°C) ralentira de façon drastique le bolide, sa vitesse devant diminuer d'un facteur 10 ! Pendant 4 minutes, le rover traversera l'atmosphère martienne, recroquevillé derrière le cône rougeoyant de son bouclier thermique. A 8,5 kilomètres d'altitude, alors que la vitesse du rover n'est plus que de 1440 km/h, un immense parachute de 15 mètres de diamètre se déploiera à partir du bouclier arrière. 20 secondes plus tard, alors que la majorité de l'atmosphère est désormais derrière le rover, six boulons pyrotechniques seront mis à feu pour désolidariser le bouclier thermique devenu inutile. Ce dernier retombera à quelques kilomètres du site d'atterrissage. Encore 10 secondes et une bride en Zylon (un matériel similaire au Kevlar), dont l'une des extrémités est attachée au bouclier arrière, et l'autre au rover, commence à se dérouler. Après une descente en rappel de 10 secondes, le robot se retrouvera 20 mètres en dessous du bouclier arrière, toujours rattaché au parachute. L'objectif est de dégager suffisamment d'espace autour de l'atterrisseur pour permettre le gonflage des coussins, augmenter la stabilité de l'ensemble parachute - bouclier arrière - atterrisseur, et éloigner Spirit des tuyères des rétrofusées RAD du bouclier arrière. Simultanément, un radar altimétrique, dont le rôle est de détecter la surface martienne, se met en marche et commence à inonder le ciel martien de pulses d'ondes radio. Le radar est conçu pour accrocher la surface à une altitude de 2,4 kilomètres. Pour sécuriser au maximum la phase de descente sous parachute, les rovers possèdent deux nouveaux dispositifs, qui étaient absents chez Pathfinder. Ces systèmes servent principalement à annuler d'éventuelles sautes de vents horizontales, qui pourraient incliner le bouclier arrière sur lequel sont fixés les propulseurs RAD, et déporter ainsi latéralement le rover. Le premier dispositif consiste en une série de trois petites rétrofusées montées horizontalement sur le bouclier arrière et commandées par un ensemble gyroscope / accéléromètre. En cas d'éventuelles bourrasques, ces petits propulseurs (dénommés Transverse Impulse Rocket Subsystem ou TIRS) peuvent être mis à feu dans n'importe quelle combinaison pour forcer le bouclier arrière à rester horizontal. Par mesure de sécurité, la vitesse horizontale de l'atterrisseur au moment de l'impact avec la surface martienne ne doit pas dépasser 16 mètres par seconde. Si le sous-système TIRS est efficace en cas de rafales brusques, son utilité semble réduite dans le cas de vents horizontaux plus faibles mais constants, capables de déporter l'atterrisseur sans incliner suffisamment le bouclier arrière pour que l'ensemble gyroscope / accéléromètre soit alerté. Pour répondre à ce cas de figure, les ingénieurs ont donc ajouté une petite caméra de descente (DIMES), dont l'objectif est de prendre trois images successives de la surface de Mars à 4 secondes d'intervalle. L'ordinateur de bord analysera alors immédiatement les clichés pour calculer la dérive horizontale de l'atterrisseur par rapport au sol. Les données recueillies seront ajoutées à celles collectées par l'ensemble gyroscope / accéléromètre, l'ordinateur ayant ensuite assez d'information pour décider d'allumer une ou plusieurs fusées TIRS. L'acquisition des images aura lieu 18 secondes avant l'allumage des fusées de freinage RAD rivetées sur le bouclier arrière. 8 secondes avant le contact avec la surface martienne, des générateurs de gaz gonflent les 24 airbags qui entourent le rover. Ces derniers ont été tissés avec du Vectran, une fibre synthétique plus résistante que le Kevlar. 2 secondes après avoir été englouti sous ses ballons protecteurs, à environ 150 mètres du sol, le rover déclenche les rétrofusées RAD fixées au bouclier arrière, dont le rôle est de compléter le freinage du parachute en stoppant la sonde en plein ciel (les fusées TIRS pouvant déjà être en fonctionnement). 3 secondes plus tard, alors que le rover n'est plus qu'à 12 mètres de la surface martienne, la bride qui le reliait au bouclier arrière est sectionnée. Le rover termine alors sa course en chute libre et heurte violemment la surface rouillée des déserts martiens. Protégé par son cocon d'airbags, le rover va rebondir pendant plusieurs minutes comme un ballon de volley sur une plage. L'engin pourra parcourir horizontalement un bon kilomètre avant de s'immobiliser définitivement. 20 minutes après son arrivée fracassante, les airbags, dégonflés, commenceront à être rétractés. Le processus mettra environ une heure pour parvenir à son terme. Telle une fleur au petit matin, l'atterrisseur tétraédrique ouvrira alors ses pétales métalliques pour dévoiler le rover (dans le cas où la sonde n'a pas atterri à l'endroit, l'ordre d'ouverture des pétales permettra de la remettre d'aplomb). A peine extirpé de sa coquille, le rover déploiera ses panneaux solaires et balayera le site d'atterrissage à l'aide de ses quatre caméras anti-dangers. Ces étapes marqueront le début d'une longue phase de configuration, qui s'étalera sur plusieurs jours. Il ne faudra donc pas s'attendre à voir ces explorateurs robotiques s'élancer à la conquête des déserts martiens dès leur arrivée ! Après ses panneaux solaires, le rover devra déployer son antenne grand gain, ainsi que le mât instrumental qui supporte la caméra panoramique et la caméra de navigation. Cette dernière aura la lourde tâche d'effectuer le premier panorama à 360° du site d'atterrissage, pour permettre aux ingénieurs de guider avec le maximum de sécurité le rover, quand celui-ci recevra l'ordre de quitter son atterrisseur. Une fois cette phase de reconnaissance terminée, le rover, qui était recroquevillé sur lui-même tel un animal apeuré, va étirer ses membres mécaniques et se dresser de toute sa hauteur. Il prendra alors un panorama à haute résolution du site d'atterrissage dans le domaine du visible et de l'infrarouge grâce à la caméra PanCam et au Mini-TES, pour permettre aux scientifiques de planifier ses futurs déplacements. Les premiers joursAprès ses premiers repérages, le rover passera sans doute quelques semaines à analyser les roches et les sols au voisinage immédiat de son site d'atterrissage. C'est seulement lorsqu'il aura épuisé les possibilités scientifiques du secteur d'atterrissage qu'il pourra mettre les voiles et partir vers de nouveaux horizons. Contrairement à celui de Pathfinder qui assurait les télécommunications et qui supportait des instruments scientifiques, l'atterrisseur sera complètement passif et n'aura aucun rôle scientifique à jouer : son seul objectif sera de déposer sain et sauf le rover à la surface de Mars. Une fois à pied d'œuvre, chaque rover pourra donc le laisser derrière lui. A aucun moment il n'aura besoin de revenir sur ses pas. Structure métallique aux airbags recroquevillés, l'atterrisseur finira sa mission en traînant lamentablement sur le sol, telle une épave abandonnée par les hommes. Au cours de sa mission, le rover se déplacera continuellement à la surface de Mars, s'arrêtant ici et là pour mener des investigations scientifiques. Les données scientifiques et les images seront normalement transmises chaque fin d'après-midi. Pour planifier les futurs mouvements du rover, les navigateurs étudieront les images panoramiques renvoyées par celui-ci. Après avoir défini un chemin jalonné de points de passage intermédiaires, les ordres seront transmis à chaque rover en début de matinée. Entre les points de passage, Spirit et Opportunity chemineront de manière autonome, en optimisant leur trajet et en se tenant à l'écart des éventuels dangers que la planète rouge ne manquera pas de faire surgir devant leurs roues. Pour planifier les déplacements, l'idéal pour les scientifiques aurait été de disposer d'images prises par une caméra de descente similaire à celle qui équipait Mars Polar Lander (MARDI). Cette caméra particulière, située juste sous l'atterrisseur, peut prendre des images du site d'atterrissage tout au long de la descente. Les premiers clichés offrent une vue globale mais peu détaillée du site, alors que les derniers couvrent avec une foule de détails une petite parcelle de terrain. Le système d'atterrissage par airbags diminue cependant quelque peu l'utilité de ce genre d'instrument : les rebonds peuvent effectivement entraîner la sonde assez loin du point d'impact initial, et la sonde peut alors finir par sortir du champ de la caméra de descente. Il est cependant regrettable qu'aucun objectif scientifique n'ait été affecté à la caméra DIMES intégré au système d'entrée, de descente et d'atterrissage. Le déplacement journalier du MER étant de 40 mètres (pendant longtemps, la NASA a annoncé un déplacement potentiel de 100 mètres, avant de revoir ses ambitions à la baisse), le robot pourrait parcourir plus de 3 kilomètres pendant toute la durée de sa mission. Comme il passera la majeure partie de son temps à conduire des analyses scientifiques, il ne devrait cependant pas traverser plus de 1 km. Chaque rover s'est vu assigner une mission de 3 mois martiens. Plusieurs facteurs pourraient cependant diminuer cette durée souhaitée de fonctionnement : l'arrivée de l'automne martien, avec une diminution de l'ensoleillement et une baisse des températures, l'augmentation de la distance Terre - Mars (qui va rendre plus difficile les communications radios) ainsi que le dépôt inéluctable de la poussière sur les panneaux solaires. La surface des panneaux a été maximisée pour retarder le plus possible cet obscurcissement inévitable, mais aucun mécanisme de dépoussiérage n'a été prévu (seuls les panneaux latéraux mobiles pourront être inclinés pour tenter de faire tomber la poussière). Il est possible que la NASA décide de placer en veille les deux rovers juste avant l'épuisement complet des batteries, pour tenter de les réactiver après le passage de l'hiver, à la fin du printemps ou au début de l'été de l'année suivante ... Objectifs scientifiquesLes principaux objectifs scientifiques de Spirit et d'Opportunity sont les suivants :
Les sites d'atterrissageSpirit et Opportunity seront avant tout des géologues de terrain. Leur objectif principal sera le décryptage du passé climatique de la planète Mars, avec en toile de fond la problématique de l'eau. Deux sites d'atterrissage très prometteurs ont été choisis parmi plus de 155 candidats potentiels, au cours d'un laborieux processus de sélection. Selon la NASA, les deux sites d'atterrissage retenus offriraient un bon compromis entre les contraintes de sécurité d'une part (le site le plus intéressant n'est d'aucune utilité si la sonde est condamnée à s'y écraser) et l'intérêt scientifique d'autre part (le site le plus sûr n'a pas de raisons d'être s'il ne se prête à aucune investigation scientifique). Pouvoir choisir un site en se basant uniquement sur des critères scientifiques serait bien sûr idéal. Mais la planète choisie, et l'architecture du système d'atterrissage imposent ici de nombreuses contraintes auxquels doit répondre le site potentiel : proximité de l'équateur (pour des questions d'ensoleillement et de température), altitude faible (l'épaisseur de l'atmosphère doit être suffisante pour que les parachutes soient efficaces), surface non accidentée (il faut en particulier tenir compte des pentes et de la quantité de rochers), vents faibles (pour des questions de stabilité à l'atterrissage), peu de poussière, etc. Le processus de sélection peut donc rapidement prendre des allures de casse-tête. Heureusement, dans le cas des MER, ce dernier a largement bénéficié des informations transmises par les derniers orbiteurs martiens. Contrairement au site d'atterrissage de Pathfinder, qui avait été choisi uniquement sur la base des images Viking, les scientifiques et ingénieurs ont effectivement pu s'appuyer sur l'avalanche d'images et de données collectées par les puissantes sondes Mars Global Surveyor et Mars Odyssey pour choisir les sites des deux rovers. Spirit sera dirigé vers le cratère d'impact Gusev. Cette dépression circulaire de 166 km de diamètre est située à l'embouchure d'une belle vallée fluviale de 900 kilomètres de long, Ma'adim Vallis. Les images renvoyées par les sondes Viking et Mars Global Surveyor montrent de nombreux indices (delta, terrasses fluviatiles) qui laissent penser que le cratère Gusev a un jour été occupé par un lac, alimenté par les flots de Ma'adim Vallis. Ce paléolac est situé dans l'hémisphère sud, à 14,57° de l'équateur, pour une longitude de 175,47° E. L'ellipse d'incertitude, à l'intérieur de laquelle le rover se posera, mesure 110 kilomètres de longueur pour 15 kilomètres de large. Opportunity sera quant à lui dirigé aux antipodes du cratère Gusev, sur une plaine morne et désolée située à 1,95°S de l'équateur (longitude 354,47°E), Sinus Meridiani. Cette région est sortie de l'ombre en 1998, lorsque la sonde Mars Global Surveyor y a découvert une forte concentration d'hématite. Si cet oxyde de fer abonde à la surface de Mars, il est ici présent sous la forme de gros cristaux de couleur gris métallique. Sur Terre, ce type d'hématite se forme préférentiellement en présence d'eau, d'où l'intérêt porté par les planétologues à la région de Sinus Meridiani, qui aurait pu être le siège d'une vaste activité hydrothermale. La position diamétralement opposée des sites d'atterrissage présente un avantage non négligeable en termes de communication : à un instant donné, un seul rover sera en mesure d'établir une liaison avec les antennes du DSN (le réseau d'écoute de l'espace lointain de la NASA), le second étant situé sur la face cachée de la planète. Ainsi, Spirit et Opportunity n'auront jamais à partager une bande passante réduite et précieuse. Le relief de Sinus Meridiani, qui est très peu prononcé, devrait offrir à Opportunity le maximum de chance d'atterrir sain et sauf. En comparaison, le cratère Gusev apparaît plus accidenté. L'atterrissage sera alors plus risqué mais en contrepartie, les reliefs pourraient rendre le site plus intéressant géologiquement que les terres désolées de Sinus Meridiani. Si Opportunity est perdu en cours de route, Spirit sera redirigé vers Sinus Meridiani, considérée comme plus sûr. Les deux sites principaux continuent à être scrutés de très près par les scientifiques. En cas de besoin, l'un des deux rovers pourrait être guidé vers un site de secours situé sur les vastes plaines d'Elysium. Les instruments scientifiquesPour mener à bien ses investigations scientifiques, chaque rover est équipé d'un ensemble d'instruments baptisé ATHENA. Celui-ci n'est autre qu'une version réduite du package Athena qui devait être embarqué sur l'ancien rover de la mission de retour d'échantillons (il portait alors le nom d'APEX, pour Athena Precursor Experiment). Cet package regroupe cinq instruments scientifiques : deux sont fixés sur le mât du rover (une caméra panoramique et un spectromètre infrarouge), alors que les trois autres sont montés à l'extrémité d'un bras télescopique extrêmement agile (IDD, Instrument Deployment Device), sur une petite structure rotative en forme de croix. Les trois premières extrémités de la croix sont occupées par un spectromètre APXS, un spectromètre Mössbauer et une caméra microscopique. La dernière supporte une petite meule capable d'ôter la poussière et la couche superficielle altérée des roches pour en exposer une section fraîche aux instruments d'analyse. Contrairement aux apparences, les instruments scientifiques ne représentent qu'une petite partie du poids total de chaque rover. Ainsi, par rapport aux MER, les sondes Viking emportaient 66 % de charge utile en plus. La mission n'est donc pas aussi focalisée sur la science que la NASA veut bien le laisser entendre dans ses nombreux communiqués de presse. Le système d'imagerie permettra d'obtenir des images couleur et stéréo des régions avoisinants chaque rover. Il comprend une caméra à haute résolution (PanCam) flanquée d'une caméra monochrome de navigation (NavCam). Ces deux caméras sont fixées à l'extrémité d'un mât, qui les porte à hauteur d'homme (1,55 mètres au-dessus du sol).Avec un capteur CDD de 1024 pixels sur 1024 pixels, la résolution de la caméra panoramique sera trois fois supérieure à celle du système d'imagerie de Pathfinder (IMP). Les caméras permettront aux scientifiques d'identifier des roches et des sols potentiellement intéressants en vue d'une analyse ultérieure par d'autres instruments. Les panoramas fourniront des informations sur la topologie et la morphologie des terrains, la distribution des rochers, la présence de dunes. La capture d'images à différentes longueurs d'onde (de 0,4 à 1,1 microns) grâce à une roue comportant 8 filtres renseignera également de manière sommaire sur la minéralogie des roches et des sols. La caméra est aussi équipée de deux filtres solaires, qui permettront de mesurer le niveau d'absorption des rayons solaires par l'atmosphère poussiéreuse de Mars. L'œil gauche de la caméra est équipé des filtres permettant l'observation dans le visible, tandis que l'œil droit possède les filtres permettant la vision infrarouge. La calibration de la caméra panoramique est assurée par un dispositif original en forme de cadran solaire, monté sur la plateforme du rover. Les coins colorés qui ornent ce cadran permettront d'ajuster les couleurs, tandis que l'ombre porté par le style servira à régler la luminosité. Le spectromètre d'émission thermique Mini-TES sera à même de déterminer la composition minéralogique des roches et des sols. Il opèrera pour cela dans le domaine infrarouge du spectre électromagnétique (de 5 à 29 microns), en captant les infrarouges émis naturellement par les objets présents à la surface de Mars. Les roches éclairées par la lumière du Soleil réfléchissent effectivement une certaine quantité de lumière dans l'infrarouge. Or de nombreux minéraux présentent des bandes d'absorption caractéristiques dans cette partie du spectre, ce qui permet leur identification. Le Mini-TES sera également capable de pénétrer la couche de poussière qui tapisse la plupart des roches de surface. Il pourra identifier des carbonates, des silicates, des minéraux déposés en milieux aqueux et éventuellement des dépôts de matière organique.La capacité des roches et du sol à conserver la chaleur malgré les larges variations de température qui ont lieu au cours d'une journée martienne sera également enregistrée. L'instrument peut également être pointé vers le ciel, ce qui permettra aux scientifiques d'effectuer pour la première fois des profils de température à haute résolution de la couche limite de l'atmosphère martienne (on appelle couche limite la partie de l'atmosphère qui interagit directement avec la surface). Le Mini-TES est une version plus compacte et plus simple du TES qui équipe la sonde Mars Global Surveyor. Le spectromètre est situé juste en dessous de la caméra panoramique, à une hauteur de 1,4 mètre et à 180° de cette dernière. Pour pouvoir observer une roche avec les deux instruments, la tête du mat sera donc obligée de faire un demi-tour complet. Deux cibles d'étalonnages servent à sa calibration : l'une est fixée sur le mât, l'autre est montée sur la plateforme. Le spectromètre Alpha Particle Rayons X (APXS pour les intimes) permettra d'obtenir la composition élémentaire des matériaux de surface. Grâce à deux modes de détection (alpha et rayons X), il pourra identifier et mesurer l'abondance de la plupart des éléments constitutifs des roches et du sol, à l'exception des deux plus légers, l'hydrogène et l'hélium. Ensemble, les deux modes de l'instrument permettront de mesurer la concentration des différents éléments avec une précision inférieure à 1 %.L'APXS embarqué sur Spirit et Opportunity est basé sur celui qui équipait l'astromobile Sojourner de la mission Pathfinder. L'instrument a cependant été amélioré, en particulier pour diminuer les interférences de l'atmosphère martienne. Composée principalement de dioxyde de carbone, cette dernière peut effectivement fausser la mesure du taux de carbone, et un problème similaire se pose avec l'azote. Pour diminuer l'importance du signal atmosphérique, des collimateurs ont été utilisés. La calibration de l'instrument après l'atterrissage permettra également de prendre en compte l'effet parasite résiduel de l'atmosphère martienne. Par rapport à Sojourner, le mode Proton, jugé redondant depuis l'amélioration de la résolution et de la sensibilité du mode rayons X, a aussi été supprimé. Une description détaillée du fonctionnement d'un APXS est disponible dans le dossier consacré à Pathfinder, et nous allons plutôt ici nous intéresser au rôle joué par l'APXS dans l'identification des roches martiennes. Nous rappellerons simplement que l'instrument bombarde l'échantillon à étudier de particules alpha et de rayons X émis par des sources radioactives de Curium 244, et analyse ensuite les particules alpha réfléchies, et les rayons X émis par les atomes excités pendant au moins 10 heures. Le mode alpha permet la détection des éléments les plus légers (comme le carbone, l'oxygène, l'azote), tandis que les éléments plus lourds sont préférentiellement étudiés grâce au mode rayons X. Pour identifier une roche, les géologues peuvent s'appuyer sur deux techniques différentes. La première consiste à identifier à et estimer le volume des principaux minéraux constitutifs du matériel rocheux. Un examen à l'œil nu ou à l'aide d'une loupe peut suffire, mais il est souvent nécessaire d'observer la roche au microscope polarisant, après avoir taillée dans cette dernière une section suffisamment fine pour que la lumière puisse la traverser. Une fois que la nature et l'abondance des différents minéraux ont été estimées, les géologues peuvent donner un nom à la roche. Ce type d'analyse est appelé analyse modale, par rapport à l'analyse normative décrite plus loin. La caméra microscopique montée sur le bras robotique pourrait permettre d'identifier quelques minéraux, tout comme le Mini-TES, mais les données obtenues ne seront pas suffisantes pour identifier avec certitude les roches qui parsèmeront la route suivie par chaque rover. Les géologues peuvent aussi déterminer la norme, c'est à dire non plus la composition minéralogique réelle, mais une composition minéralogique théorique, à partir d'analyses chimiques. La première étape consiste à mesurer précisément la concentration des principaux éléments rentrant dans la composition de la roche (silicium, oxygène, titane, aluminium, fer, manganèse, magnésium, calcium, sodium, potassium, phosphore), ce qui est tout à fait dans les cordes de l'APXS. Les résultats sont souvent exprimés en oxyde (SiO2, TiO2, Al2O3, FeO, MnO, MgO, CaO, Na2O, K2O). Grâce à ces données, les géologues peuvent alors reconstituer la minéralogie théorique de la roche en appliquant des règles de calculs très strictes (la plus connue étant la norme CIPW). Sur Mars, la minéralogie des roches sera établie par le biais de l'analyse normative, bien plus que par l'observation proprement dite des minéraux. Cette technique, qui est souvent très fiable, n'est cependant pas exempte d'inconvénients. L'un des principaux problèmes est lié au fer. Contrairement aux autres éléments constitutifs d'une roche, le fer peut être présent sous deux états : la forme réduite (Fe2+) et la forme oxydée (Fe3+). Suivant son état, le fer ne donne pas les mêmes minéraux. Or l'APXS est incapable de faire la distinction entre ces deux formes, et considère que tout le fer est sous forme réduite, ce qui peut fausser l'analyse normative si la quantité de fer oxydé est importante. L'analyse chimique doit donc être complété par une détermination précise de la quantité de fer ferrique (Fe2+) et ferreux (Fe3+), ce qui est justement l'un des objectifs du spectromètre Mössbauer, présenté plus loin. Outre son rôle central dans l'identification des roches, l'APXS fournira des informations sur les processus de formation de la croûte martienne, les mécanismes d'érosion ou la part jouée par l'eau dans les processus géologiques. Il permettra de compléter l'étude minéralogique effectuée par d'autres instruments, comme le Mini-TES. Pour corréler les résultats des différents instruments, l'APXS devra au moins analyser une roche et un sol qui auront été également scrutés par la caméra panoramique et le Mini-TES. Le détecteur de l'APXS est particulièrement sensible à la poussière, qui est omniprésente sur Mars. Pour le protéger, les ingénieurs l'ont enfermé derrière des portes qui s'ouvrent de manière astucieuse : ces dernières ne sont pas actionnées par un moteur, qui aurait alourdi le bras robotique, tout en augmentant le risque de pannes, mais par un mécanisme beaucoup plus simple, similaire à celui qui sert à faire rentrer et sortir la pointe d'un stylo à bille. Il suffit au rover d'appuyer la tête de l'APXS contre une surface pour que celle-ci s'ouvre. Une fois les mesures effectuées, il suffit d'une nouvelle pression pour que les battants se renferment sur le capteur, qui est ainsi efficacement protégé de son pire ennemi, la poussière martienne. L'APXS est porté par le bras robotique. Une cible d'étalonnage, qui sert à calibrer l'instrument, est fixée sur la face interne des portes. Tout comme le spectromètre Mössbauer, l'APXS est allemand. Spectromètre Mössbauer (MIMOS 2) Fourni par l'Allemagne, le spectromètre Mössbauer est un type de spectromètre particulièrement sensible au fer contenu dans certains minéraux. Il va permettre de déterminer l'abondance et la composition des minéraux riches en fer (carbonate de fer, sulfate de fer, nitrate de fer), ainsi que l'état d'oxydation de celui-ci (Fe2+ ou Fe3+), le tout avec une grande précision. Ses mesures viendront en complément de celles effectuées par l'APXS, et augmenteront leur validité. C'est la première fois qu'un spectromètre Mössbauer est envoyé sur Mars, la sonde Pathfinder n'ayant malheureusement pas pu en bénéficier. Le spectromètre Mössbauer servira également à mesurer les propriétés magnétiques de divers matériaux (comme le sol et la poussière), à étudier l'étendue de l'altération des roches et à identifier les minéraux formés dans des environnements chauds et humides comme les sources hydrothermales, de tels environnements constituant un milieu propice pour la découverte de fossiles d'une éventuelle vie martienne. Enfin, il complétera l'étude minéralogique effectuée par d'autres instruments, comme le Mini-TES. Pour réaliser des analyses, le spectromètre Mössbauer doit être plaqué contre l'échantillon à étudier. Comme pour l'APXS, il faudra en moyenne une dizaine d'heures à l'instrument pour compléter une analyse. L'effet Mössbauer, sur lequel s'appuie ce spectromètre, a valu le prix Nobel de physique à son découvreur, Rudolf Ludwig Mössbauer. Cet effet est dû à une particularité du phénomène d'absorption de rayons gamma par un atome. Lorsqu'un rayon gamma heurte de plein fouet un atome, on observe normalement un effet de recul. Si l'atome frappé appartient à un réseau cristallin très serré, le recul n'a cependant pas lieu, la victime se contentant de renvoyer un rayon gamma similaire au rayon agresseur. Ce rayon émis en retour est porteur de nombreuses informations sur l'échantillon étudié. Les mesures effectuées par un spectromètre Mössbauer sont souvent très dépendantes de la température et l'observation de changements avec des variations de température aidera à déterminer la nature des minéraux porteurs de fer. L'instrument joue aussi un rôle inattendu : il aide le microscope à effectuer sa mise au point. Sur des surfaces dures comme les roches, le microscope utilise un petit capteur métallique pour déterminer la distance à laquelle la roche apparaîtra de manière nette (il ne dispose effectivement pas d'une fonction d'autofocus). Cependant, sur des surfaces meubles comme le sol, le capteur n'est d'aucune utilité. C'est là qu'intervient le spectromètre Mössbauer : le senseur du spectromètre, un petit disque métallique (qui rentre au contact des objets à étudier lors des mesures) peut effectivement être utilisée pour aplanir le sol et créer une surface suffisamment compacte pour que le microscope puisse effectuer sa mise au point. Le spectromètre Mössbauer est fixé sur le bras robotique. Pour les opérations de calibration, il utilise une fine section d'une roche riche en magnétite (un oxyde de fer de formule Fe3O4). Une version identique de cet instrument équipe également l'atterrisseur britannique Beagle 2. Comme son nom l'indique, cet instrument combine une caméra et un microscope. Il va fournir des vues extrêmement rapprochées et détaillées de la surface des roches et du sol. La résolution spatiale sera de 20 à 40 microns par pixel. Avec des images mesurant 2 cm de côté, le champ de vision sera assez large pour éviter de repositionner souvent le bras mobile. Le microscope ne dispose pas d'une fonction autofocus, et la mise au point est effectuée grâce à une petite tige métallique qui permet de déterminer la distance idéale entre l'objectif du microscope et la surface à étudier (les surfaces meubles doivent d'abord être compactées par le spectromètre Mössbauer avant de pouvoir être imagées). Les clichés obtenus seront très utiles pour déterminer la minéralogie, la texture et la morphologie des matériaux étudiés. Ces informations permettront de faire toute la différence entre une roche sédimentaire, une lave volcanique ou un fragment résultant d'un impact météoritique. En étant capable de discerner la taille et la forme des grains constituant une roche sédimentaire ou un sol, les scientifiques seront à même de déterminer leur mode de transport et de dépôt. Pour comprendre l'importance de cette caméra, je vous conseille de faire un petit tour sur la page qui traite des découvertes géologiques du robot Sojourner et des limitations qui ont alors été mises en évidence. La caméra microscopique est fixée sur le bras robotique en compagnie des deux spectromètres et d'une petite meule. En plus de ses cinq instruments, chaque rover emporte avec lui un outil très utile, le RAT (Rock Abrasion Tool), qui constitue l'équivalent du fameux marteau des géologues. Lorsqu'ils sont sur le terrain, les géologues emportent effectivement toujours avec eux un marteau, de façon à pouvoir briser les roches. Sur Terre, la teinte de surface des roches est souvent bien différente de l'intérieur, à cause des processus d'altération superficiels (que les géologues désignent sous le terme de patine). Il est parfois stupéfiant de constater la différence de teinte qui peut exister entre la surface d'une roche et une cassure fraîche. L'altération superficielle des roches est particulièrement prononcée dans les régions désertiques, ou les roches sont souvent recouvertes d'un vernis du désert, une sorte d'enduit vitrifié, brillant, coloré en brun ou en noir par des sels de fer et de manganèse. Cet encroûtement, qui doit impérativement être éliminé si l'on veut conduire une étude géologique digne de ce nom, serait susceptible de se former sur Mars. Grâce au RAT, les rovers pourront abraser la surface des matériaux à étudier, et ôter ainsi la poussière et les couches superficielles altérées pour mettre à jour la roche saine. La meule peut dégager une zone circulaire de 4,5 centimètres de diamètre, et d'une profondeur maximale de 5 millimètres. Ce système permettra d'éviter les déboires géologiques qu'a connus le petit robot Sojourner, qui analysait plus le manteau de poussière qui recouvrait les roches que les roches proprement dites ! La meule est fixée sur le bras robotique. Sa tête est composée d'une multitude de petits éclats de diamants incorporés dans une résine solide. Cette solution a été retenue pour sa résistance à l'usure. Après un certain temps d'utilisation, les diamants émoussés tombent d'eux-mêmes, exposant ainsi des éclats frais situés juste en dessous. La meule est entourée d'une jupe qui protégera le rover des particules émises pendant le ponçage. Contrairement à la sonde Beagle 2 qui dispose d'une petite taupe, Spirit et Opportunity n'ont pas été équipés d'un dispositif capable de creuser le sol martien. Ils pourront cependant utiliser une astuce, déjà employée par Sojourner, pour observer ce qui se cache sous la couche la plus superficielle du sol : en bloquant cinq de leurs roues et en patinant avec la sixième, les rovers pourront effectivement égratigner une petite portion de la surface martienne. Pièges magnétiques En plus des 5 instruments principaux, chaque rover est également équipé de trois séries de pièges magnétiques fournis par le Danemark (7 aimants au total). Le rôle de ces dispositifs est de capturer les particules de poussière dotées de propriétés magnétiques, pour pouvoir ensuite les étudier en détails. Chaque série est composée d'aimants plus ou moins puissants emboîtés les uns dans les autres. L'une des séries est fixée au RAT au niveau de la jupe, une position qui lui permettra de retenir les particules de poussière qui adhérent aux roches, et qui ne manqueront pas de s'échapper au cours des opérations de meulage. Cette série ne pourra être observée que par la caméra panoramique. La seconde série d'aimants est destinée à collecter les particules magnétiques en suspension dans l'air. Placée sur la partie avant de chaque rover, elle se trouve à portée des spectromètres APXS et Mössbauer, qui pourront ainsi analyser les particules qui s'y colleront. Le troisième groupe d'aimants est suffisamment puissant pour pouvoir dévier les particules entraînées par les vents. Il est boulonné au niveau de la plateforme, dans une zone située à portée de la caméra panoramique. Vivement 2004 !Après 7 ans d'absence, la NASA a donc décidé de retourner à la surface de Mars. En choisissant d'envoyer deux robots similaires à Sojourner, qui utiliseront de surcroît le système d'airbags testé avec brio lors de cette mission, l'agence spatiale américaine espère bien renouer avec le succès. L'atterrissage de Sojourner en juillet 1997 avait constitué l'un des événements les plus populaires de l'histoire de l'Internet, avec 500 millions de hits en un mois. L'arrivée de Spirit et d'Opportunity, et leur déambulation à la surface de Mars, pourraient bien pulvériser ce record. Le périple de Spirit
Pour en savoir plus :
|
Spirit, le premier des deux géologues robotiques de la NASA, s'est envolé vers Mars le 10 juin 2003 à 19:59, après deux reports consécutifs dus à une météo défavorable. Le lanceur utilisé était une fusée Delta II 7925 fabriquée par Boeing (Crédit photo : NASA).
Le même, mais de nuit. Le ciel de Cap Canaveral s'est embrasé lorsque Opportunity s'est élancé vers la planète rouge le mardi 8 juillet à 05:18, après une agaçante série de reports qui a semblé interminable. De nombreux événements sont effectivement venus se liguer contre le départ du rover, depuis des problèmes techniques sur le lanceur (décollement d'une bande de liège assurant l'isolation thermique du premier étage, batterie défectueuse du système d'autodestruction), jusqu'à un bateau de pêche voguant en zone interdite, en passant par les traditionnelles sautes d'humeur de la météo (Crédit photo : NASA).
L'étage de croisière, qui a la lourde tâche de supporter le rover pendant le voyage vers Mars, mesure 2,65 mètres de diamètre. Ses panneaux solaires (qui recouvrent une surface de 4,4 m2) assurent l'alimentation en énergie. L'étage de croisière possède également deux antennes pour les communications avec la Terre (moyen et faible gain), des petits moteurs pour les corrections de trajectoire (fonctionnant à l'hydrazine) et deux senseurs (solaire et stellaire) pour la navigation. L'intelligence est par contre fournie par l'ordinateur du rover. L'étage de croisière tourne sur lui-même à raison de deux tours par minute pour se stabiliser (Crédit photo : Daniel Maas / Maas Digital LLC).
Après un voyage de 7 mois et demi, Spirit rencontrera l'atmosphère martienne à une altitude de 128 kilomètres et à une vitesse d'environ 20 000 km/h. La friction sur les couches denses de l'atmosphère martienne va fortement ralentir le vaisseau, celui-ci étant protégé de l'échauffement par un bouclier thermique hérité de la sonde Pathfinder (Crédit photo : Daniel Maas / Maas Digital LLC).
Tel un diamant dans le ciel martien, Spirit se dirige vers son objectif (Crédit photo : Daniel Maas / Maas Digital LLC).
A une altitude de 8,5 kilomètres, un parachute de 15 mètres de diamètre s'ouvrira pour ralentir la sonde et compléter le freinage atmosphérique. En surface, on distingue le rempart du cratère d'impact Gusev. Sur la droite, le lit d'une ancienne vallée a percé la muraille du cratère et celui-ci a donc pu héberger dans un lointain passé une vaste étendue d'eau liquide (Crédit photo : Daniel Maas / Maas Digital LLC).
Recroquevillé dans son atterrisseur tétraédrique, le rover continue sa descente vers la surface martienne (Crédit photo : Daniel Maas / Maas Digital LLC).
Six secondes avant l'atterrissage, les rétrofusées RAD, fixées sur le bouclier arrière, s'allument pour stopper la sonde en plein ciel (Crédit photo : Daniel Maas / Maas Digital LLC).
A 280 mètres d'altitude, la grappe d'airbags va se gonfler tout autour de l'engin pour former un cocon protecteur. Tel un ballon de plage, la sonde rebondira une dizaine de fois à la surface de Mars (le premier rebond sera de 20 mètres) avant de s'immobiliser définitivement à environ 0,8 kilomètres de son point d'impact initial (Crédit photo : Daniel Maas / Maas Digital LLC).
Après avoir dégonflé ses airbags, la plateforme porteuse s'ouvrira comme une fleur, exposant pour la première fois le rover aux rigueurs du climat martien. Ce dernier entamera alors son propre déploiement (sur cette image, on assiste à l'ouverture des panneaux solaires) (Crédit photo : Daniel Maas / Maas Digital LLC).
Pour rejoindre la surface de Mars, le rover empruntera l'une des trois rampes souples (les "batwings") tendues entre les pétales de l'atterrisseur. En 1997, pour quitter Pathfinder, le petit robot Sojourner ne disposait que de deux rampes, une avant et une arrière (Crédit photo : Daniel Maas / Maas Digital LLC).
Désormais inutile, le vaisseau porteur repose sur le sol martien, entouré par une couronne d'airbags fripés. Spirit s'apprête à l'abandonner définitivement pour partir vers l'inconnu, sous le regard de millions de terriens (Crédit photo : Daniel Maas / Maas Digital LLC).
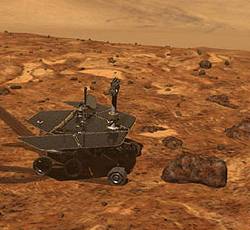
Pesant 174 kg, Spirit pourra parcourir jusqu'à 40 mètres par jour à la surface de Mars. Ce robot est en fait un véritable petit géologue ambulant. Sa caméra microscopique lui servira de loupe, tandis que la meule (dont la fonction est de décaper les roches) remplacera le fameux marteau que les géologues emportent toujours avec eux sur le terrain. Chaque rover possède également une caméra panoramique, trois spectromètres, ainsi que des aimants capables de piéger la fraction magnétique de la poussière martienne (Crédit photo : Daniel Maas / Maas Digital LLC).
Description de la séquence d'atterrissage des Mars Exploration Rover. Cliquez sur l'image pour l'agrandir (Crédit photo : NASA/JPL).
Schéma technique d'un Mars Exploration Rover. Cliquez sur l'image pour l'agrandir (Crédit photo : NASA/JPL).
Spirit s'approche lentement d'une cible potentielle. La structure triangulaire des panneaux solaires lui confère une allure vaguement menaçante, voire agressive. Une fois le rocher à portée, le rover l'auscultera grâce à son bras robotique (Crédit photo : Daniel Maas / Maas Digital LLC).
Gros plan sur le bras robotique fixé à l'avant des rovers. Celui-ci se termine par une structure en croix qui supporte quatre instruments. Sur cette image, le dispositif d'abrasion (RAT) est pointé vers le rocher (en bas à droite). Le spectromètre APXS est situé à l'opposé du RAT (vers le rover), le spectromètre Mössbauer regarde vers la droite (vers la roue avant gauche du rover) et la caméra microscopique est dirigée vers la gauche (vers la roue avant droite du rover). La croix est capable de tourner sur elle-même pour présenter devant une roche les différents instruments (Crédit photo : Daniel Maas / Maas Digital LLC).
Gros plan sur la gueule du RAT (Crédit photo : Daniel Maas / Maas Digital LLC).
Le bras robotique s'apprête à appliquer l'outil d'abrasion (RAT) sur une roche martienne (Crédit photo : Daniel Maas / Maas Digital LLC).
Une fois le travail de la ponceuse terminé, les instruments du bras robotique pourront être appliqués contre la roche à étudier (Crédit photo : Daniel Maas / Maas Digital LLC).
Le système d'imagerie, fixé en haut d'un mât télescopique, comporte une caméra panoramique couleur et une caméra monochrome de navigation (Crédit photo : Daniel Maas / Maas Digital LLC).
Le microscope vu de face. Comme le spectromètre APXS, le spectromètre Mössbauer et la meule, il est porté par le bras robotique (Crédit photo : Daniel Maas / Maas Digital LLC).
La caméra microscopique sera capable de fournir des vues extrêmement rapprochées des roches martiennes, avec un champ de vision de 2 cm et une résolution spatiale de 20 microns/pixel ! L'observation à petite échelle de la texture des roches est un aspect important de la recherche d'échantillons géologiquement intéressants (Crédit photo : JPL/NASA).
Le capteur du spectromètre APXS des MER. Ce spectromètre, dérivé de celui de Sojourner (le robot de la mission Pathfinder), profite de l'expérience acquise pendant cette mission. Utilisant une source radioactive (curium 244) et possédant deux modes de détection (alpha et rayons X), il va permettre de connaître la composition élémentaire du sol et des roches. Le CO2 atmosphérique ne devrait plus être une gêne pour lui. L'atmosphère martienne, principalement composée de CO2, avait effectivement sérieusement limité l'étendue des mesures pendant la mission Pathfinder, en particulier dans l'un des modes de fonctionnement (alpha). Cet APXS sera également équipé d'une cible de composition connue qui servira à calibrer finement l'instrument une fois sur Mars (Crédit photo : droits réservés).
Le Mini-TES, un spectromètre infrarouge basé sur le spectromètre qui équipe l'orbiteur Mars Global Surveyor. Chaque pixel du Mini-TES est un spectre infrarouge complet. Cet instrument sera capable d'identifier de nombreux minéraux comme l'hématite, le gypse ou encore la calcite (Crédit photo : droits réservés).
Le spectromètre Mössbauer : on appréciera la taille de l'appareil ! Ce spectromètre est dédié à l'étude des minéraux contenant du fer (cet élément jouant un rôle important sur la planète Mars, à laquelle il confère sa teinte brun/jaune caractéristique). Le spectromètre Mössbauer enregistre l'absorption par les atomes de fer de rayons gamma produits par deux sources radioactives de cobalt 57 (Crédit photo : droits réservés).
Deux mondes, un Soleil. C'est la devise qui figure sur le cadran solaire qui équipe Spirit et Opportunity. Tout en permettant d'apprécier le passage des heures et des saisons, l'ombre du style central servira à régler la luminosité de la caméra panoramique. La face supérieure richement colorée du cadran jouera aussi le rôle de mire d'étalonnage pour les couleurs. Des petits miroirs fixés sur les extrémités du cadran permettront d'observer la couleur du ciel au cours d'une journée. Le mot Mars, traduit dans 17 langues différentes, apparaît sur la face supérieure du cadran. Le cercle gris clair, qui porte la devise "Deux Mondes, un Soleil" ainsi que la mention "Mars 2004", représente l'orbite de Mars, celle de la Terre étant figurée en gris foncé. La sphère dorée fixée au sommet du style symbolise quant à elle notre soleil. Les quatre côtés du cadran solaire sont ornés de petites plaques gravées, qui portent un court texte accompagné de nombreux dessins d'enfants (Crédit photo : droits réservés). |
| Labrot © 1997-2025. Dernière mise à jour : 16 mars 2015. Des commentaires, corrections ou remarques ? N'hésitez pas, écrivez moi! |
|
|
index |